Lab 7, Ioan Dragomir
Process Modeling, prof. Daniel Moga, Technical University of Cluj-Napoca
Electromechanical analogy. Modeling a dampened mechnical system (car suspension) using an electric circuit.
| Electric | Mechanic | Obs. | ||
| Parameter | Relation: \(i(t) \to u(t)\) | Parameter | Relation: \(f(t) \to v(t)\) | |
| \( u(t) \) | \( v(t) \) | |||
| \( i(t) \) | \( f(t) \) | |||
| \(R\) | \( u(t) = Ri(t) \) | \(B\) | \( v(t) = \frac{1}{B} f(t) \) | \( B = 1/R \) |
| \(C\) | \( \frac{du(t)}{dt} = \frac{i(t)}{C} \) | \(M\) | \(\frac{dv(t)}{dt} = \frac{f(t)}{M}\) | \( M = C \) |
| \(L\) | \( u(t) = L \frac{di(t)}{dt} \) | \(K\) | \( v(t) = \frac{df(t)}{dt} / K \) | \( L = 1/K \) |
\[ x(t) = \begin{pmatrix} i_{L_t}(t) \\ u_{C_u}(t) \\ i_{L_s}(t) \\ u_{C_s}(t) \end{pmatrix} \]
\[ \dot x(t) = \begin{pmatrix} \frac{di_{L_t}(t)}{dt} \\ \frac{du_{C_u}(t)}{dt} \\ \frac{di_{L_s}(t)}{dt} \\ \frac{du_{C_s}(t)}{dt} \end{pmatrix} = \begin{pmatrix} 0 & -\frac{1}{L_t} & 0 & 0 \\ \frac{1}{C_u} & -\frac{1}{R_sC_u} & -\frac{1}{C_u} & \frac{1}{R_sC_u} \\ 0 & \frac{1}{L_s} & 0 & -\frac{1}{L_s} \\ 0 & \frac{1}{R_sC_s} & \frac{1}{C_s} & -\frac{1}{R_sC_s} \end{pmatrix} \begin{pmatrix} i_{L_t}(t) \\ u_{C_u}(t) \\ i_{L_s}(t) \\ u_{C_s}(t) \end{pmatrix} + \begin{pmatrix} \frac{1}{L_t} \\ 0 \\ 0 \\ 0 \end{pmatrix} u\]
and, by the electromechanical analogy:
\[ \dot x(t) = \begin{pmatrix} 0 & -K_t & 0 & 0 \\ \frac{1}{M_u} & -\frac{B_s}{M_u} & -\frac{1}{M_u} & \frac{B_s}{M_u} \\ 0 & K_s & 0 & -K_s \\ 0 & \frac{B_s}{M_s} & \frac{1}{M_s} & -\frac{B_s}{M_s} \end{pmatrix} x(t) + \begin{pmatrix} K_t \\ 0 \\ 0 \\ 0 \end{pmatrix} z_r(t) \]
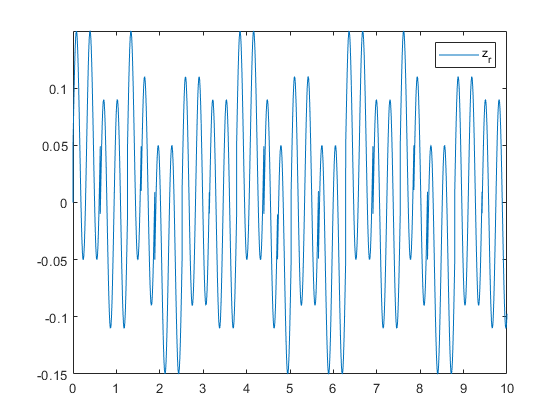
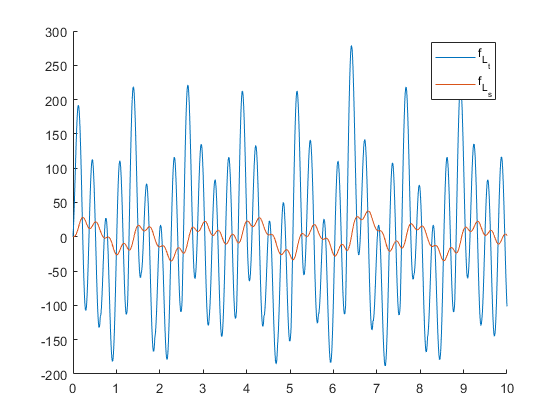
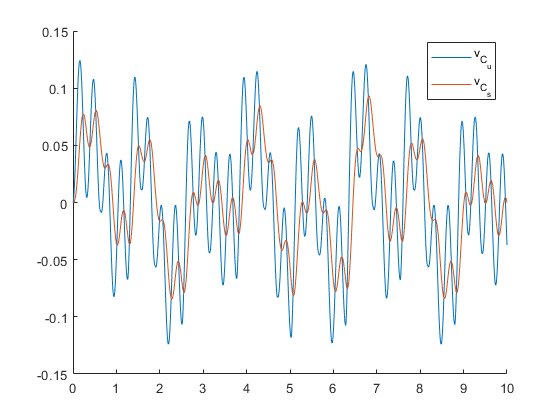
M_s = 300; K_s = 2800; B_s = 2000; M_u = 30; K_t = 21000; global A B z_r; A = [ 0, -K_t, 0, 0 1/M_u, -B_s/M_u, -1/M_u, B_s/M_u 0, K_s, 0, -K_s 0, B_s/M_s, 1/M_s, -B_s/M_s ]; B = [K_t; 0; 0; 0]; z_r = @(t) (0.1 * sin(20 * t) + 0.03 * sign(sin(5 * t)) + 0.02 * sign(sin(2 * t))); [t, x] = ode45(@suspension_system, [0, 10], [0; 0; 0; 0]); figure; fplot(z_r, [0, 10]); legend("z_r"); figure; hold on; plot(t, x(:,1)); plot(t, x(:,3)); legend(["f_{L_t}", "f_{L_s}"]); figure hold on; plot(t, x(:,2)); plot(t, x(:,4)); legend(["v_{C_u}", "v_{C_s}"]);
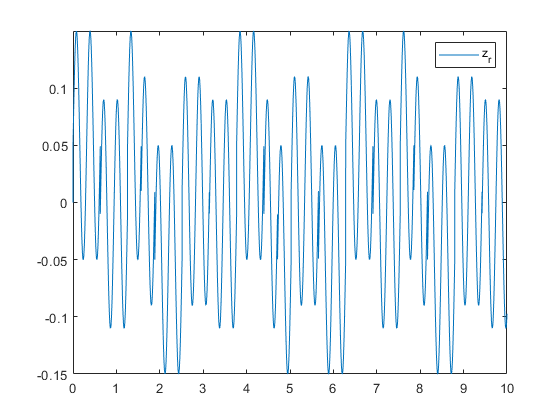
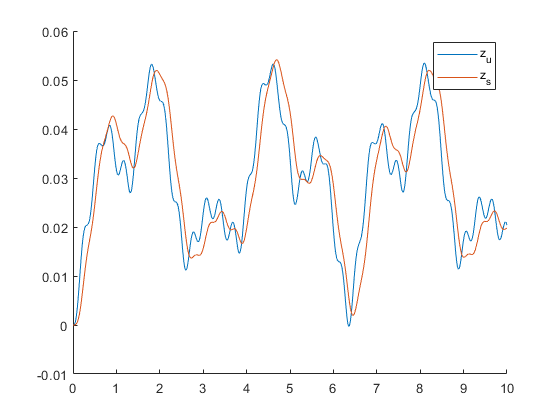
z_u = zeros([1, length(t)]); z_s = zeros([1, length(t)]); for i = 2:length(t) z_u(i) = trapz(t(1:i), x(1:i, 2)); z_s(i) = trapz(t(1:i), x(1:i, 4)); end figure; fplot(z_r, [0, 10]); legend("z_r"); figure; hold on; plot(t, z_u); plot(t, z_s); legend(["z_u", "z_s"]); function dxdt = suspension_system(t, x) global A B z_r; dxdt = A * x + B * z_r(t); end